 |
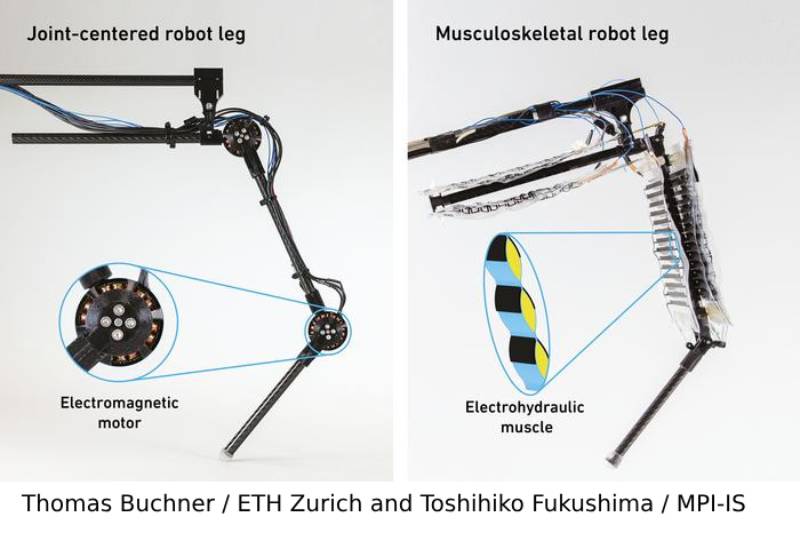
Уже почти 70 лет изобретатели создают роботов, и все эти машины работают на моторах — технологии, которой уже 200 лет. Даже ходячие роботы оснащены руками и ногами с моторами, поэтому они не такие мобильные и адаптивные, как люди и животные. Исследователи из Высшей технической школы Цюриха и Института интеллектуальных систем Макса Планка разработали новую роботизированную ногу с мускульным приводом. Она энергоэффективнее обычной, может высоко прыгать, быстро двигаться и обходить препятствия без сложных датчиков. Работу над проектом вели Роберт Катцшманн из ETH Zurich и Кристоф Кеплингер из MPI-IS в рамках исследовательского партнёрства под названием Центр обучающихся систем Макса Планка ETH (CLS). Докторанты Томас Бухнер и Тосихико Фукусима — соавторы статьи о новой ноге, опубликованной в журнале Nature Communications. Электрический заряд, как у воздушного шараМышцы-разгибатели и мышцы-сгибатели обеспечивают движение роботизированной ноги в обоих направлениях, как у людей и животных. HASELs — это электрогидравлические актуаторы, которые крепятся к скелету с помощью сухожилий. Они представляют собой заполненные маслом пластиковые пакеты, похожие на те, что используются для изготовления кубиков льда. Примерно половина каждого пакета покрыта с обеих сторон чёрным электродом из проводящего материала. Бюхнер объясняет принцип их работы на примере статического электричества: «как только мы подаём напряжение на электроды, они притягиваются друг к другу». При увеличении напряжения электроды сближаются и толкают масло в мешке в одну сторону, делая мешок короче. Приводы, прикреплённые к скелету, приводят в движение мышцы. Одна мышца сокращается, а другая, парная ей, удлиняется — как у живых существ. Исследователи используют компьютерный код, чтобы контролировать работу актуаторов: какие должны сокращаться, а какие — растягиваться. Эффективнее, чем электромоторыИсследователи сравнили энергоэффективность своей роботизированной ноги с обычной ногой, работающей от электродвигателя. Они проанализировали, сколько энергии без необходимости преобразуется в тепло.
Фукусима добавил, что роботам с электроприводом нужно управление теплом, для чего требуются дополнительные радиаторы или вентиляторы. А их система в этом не нуждается. Маневренное передвижение по неровной местностиРоботизированная нога может подпрыгнуть, потому что она способна поднимать свой вес взрывным способом. Эта нога очень адаптивная, что важно для мягкой робототехники. Эластичный опорно-двигательный аппарат легко приспосабливается к поверхности. Катцшманн объясняет:
В отличие от электродвигателей, которым нужны датчики, чтобы отслеживать угол наклона роботизированной ноги, искусственная мышца адаптируется к положению благодаря взаимодействию с окружающей средой. Для этого ей нужно всего два сигнала: один для сгибания сустава и один — для разгибания. Фукусима объясняет, что адаптация к местности очень важна. Например, когда человек приземляется после прыжка, ему не нужно заранее думать о том, под каким углом согнуть колени. То же самое относится и к опорно-двигательной системе роботизированной ноги: при приземлении сустав адаптивно перемещается под нужным углом в зависимости от поверхности. Новая технология открывает новые возможностиОбласть исследований электрогидравлических приводов появилась около шести лет назад. Кеплингер отмечает, что в робототехнике наблюдается быстрый прогресс в области передовых систем управления и машинного обучения. В то же время в другой не менее важной области робототехники прогресс был гораздо меньше. Катцшманн считает, что электрогидравлические приводы вряд ли будут использоваться в тяжёлой технике на строительных площадках. Однако они обладают преимуществами по сравнению со стандартными электродвигателями. Это особенно заметно в таких приложениях, как захваты, где движения должны быть индивидуальными в зависимости от объекта (мяч, яйцо или помидор). У Кацшмана есть замечание:
Будущая работа должна преодолеть эти ограничения и создать настоящих шагающих роботов с искусственными мышцами. Кацшман предполагает, что в будущем мы сможем использовать робота-спасателя, если объединим роботизированную ногу в четвероногого или гуманоидного робота и запитаем его от батарей. Результаты опубликованы в издании Nature Communications. 09.09.2024 |
Хайтек
 | |
| В МИФИ создан радиоизотопный прибор для отечественной металлургии | |
В Национальном исследовательском ядерном униве... | |
 | |
| NatComm: Найден «благородный» способ увеличить вместимость карт памяти | |
Электронику будущего можно сделать еще ме... | |
 | |
| Преодоление физических барьеров: на пути к новым квантовым технологиям | |
Комментирует профессор Майя Вергниори, которая... | |
 | |
| Впервые в России: в Катайске начали выпуск уникальных насосов | |
Катайский насосный завод, который находится в&... | |
 | |
| Ученые ТПУ продемонстрировали, как у капель появляются «пальцы» | |
Исследователи из Томского политехническог... | |
 | |
| Science Advances: Ученые сумели подключить электроды к клеткам | |
Исследователям из Университета Линчепинга... | |
 | |
| Компания Xanadu представляет Aurora — первый в мире фотонный квантовый компьютер | |
Компания Xanadu представила первый в мире... | |
 | |
| В ТПУ создали скэффолды с эффектом памяти формы для регенерации костной ткани | |
Ученые Томского политехнического университета ... | |
 | |
| Квантовые открытия: как исследования бозона Хиггса расширяют границы науки | |
Кэтрин Лени из ЦЕРН комментирует последни... | |
 | |
| Физики разработали алгоритм для изучения запутанности в квантовых системах | |
Квантовая запутанность — явление, п... | |
 | |
| Small Methods: Сублимация кристаллов диарилэтена — контроль над формой | |
Фотомеханические материалы из фотохромных... | |
 | |
| Квантовые датчики обеспечат технологическую революцию к 2045 году | |
Квантовые датчики находятся в авангарде т... | |
 | |
| Новый проект ЦЕРН меняет представление о производительности и устойчивости | |
Проект Эффективный ускоритель частиц, EPA,&nbs... | |
 | |
| Стало известно, зачем ЕС инвестирует 24 млн евро в полупроводники | |
Европейский союз предпринимает решительные шаг... | |
 | |
| В МИФИ создали интеллектуальную систему контроля работы 3D-принтеров | |
Сотрудники Снежинского физико-технического инс... | |
 | |
| Как приручить термоядерное горение: ученые познают секреты работы с плазмой | |
Исследователи из Милана, Италия, раскрыва... | |
 | |
| Ученые добились длительной квантовой запутанности между молекулами | |
Исследователи из Даремского университета ... | |
 | |
| В Казани собрали первую в России установку для получения твердых пеллет гидратов | |
Ученые Казанского федерального университета со... | |
 | |
| Открыт новый полупроводник с кристаллической решеткой в виде японского узора | |
Ученые СПбГУ вместе с коллегами из У... | |
 | |
| VCU: Аддитивное производство удешевляет производство магнитов | |
Новое исследование изменит производство традиц... | |
 | |
| SciRep: Разработан новый электроимпульсный метод переработки углеволокна | |
Мир стремительно движется к развитому буд... | |
 | |
| Российские ученые доказали теорию акустической турбулентности | |
Исследователи нашли новый способ моделирования... | |
 | |
| Производство термоядерной стали: первый промышленный успех в Великобритании | |
Рабочая группа Управления по атомной энер... | |
 | |
| ACSSCE: Превратить биомассу в полезный ресурс поможет инновационное устройство | |
Исследователи из Университета Кюсю разраб... | |
 | |
| Определен точный компьютерный алгоритм для восстановления изображения плазмы | |
Ученые обнаружили, что лучше всего изучат... | |
 | |
| Квантовый холодильник отлично очищает рабочее пространство квантового компьютера | |
Если вы хотите решить математическую зада... | |
 | |
| Катализатор нового поколения: ученые ускоряют производство водорода из аммиака | |
Ученые создали катализатор для получения ... | |
 | |
| В ТПУ разработали сенсоры для экспресс-мониторинга полезных и токсичных веществ | |
Специальные устройства — сенсоры, к... | |
 | |
| Умное кольцо с камерой позволяет управлять домашними устройствами | |
В то время как умные устройства в&nb... | |
 | |
| AIS: Носимый робот WeaRo снизит риск травм на производстве | |
Ученые разработали инновационного мягкого носи... | |