 |
Сборка на орбите стала одним из важнейших аспектов космической деятельности, когда манипулятор часто и непосредственно взаимодействует с объектами в процессе сложной сборки. Традиционное управление манипулятором имеет ограничения в адаптации к различным задачам сборки и уязвимо к вибрациям, что приводит к сбоям в сборке. Для решения этой проблемы исследователи из Пекинского технологического института предлагают метод управления с переменным коэффициентом усиления, основанный на переменных демпфирующих характеристиках человеческой руки. Этот метод позволяет эффективно повысить безопасность, надежность и адаптивность сборки космических роботов. Результаты исследования опубликованы в журнале Cyborg and Bionic Systems 6 сентября 2023 года. Роботы все чаще используются для технического обслуживания и ремонта в космосе благодаря их большей приспособленности к суровым условиям космического пространства по сравнению с космонавтами-людьми. Эта тенденция крайне важна для развития космической техники, поскольку она может помочь снизить риски для здоровья людей на космических станциях и решить проблемы ремонта космических аппаратов в космосе. Роботизированная сборка — важнейшая область исследований, в которой в последние годы наблюдается значительный прогресс. Основным методом, позволяющим роботам выполнять сложные задачи сборки, является контроль соответствия. Однако управление по соответствию предъявляет высокие требования к контактным характеристикам манипулятора, что затрудняет достижение требуемых уровней точности и адаптивности. В ответ на эти проблемы исследователи предложили различные методы управления соответствием, включая демпфирование, управление жесткостью, гибридное управление силой и положением, а также алгоритмы нечеткого адаптивного управления. Эти алгоритмы направлены на повышение адаптивности и эффективности роботов при выполнении задач сборки, особенно в неизвестных условиях. Задачи сборки часто предполагают контакт манипулятора с собираемым объектом. Для того чтобы чрезмерная сила контакта не повредила объект, необходимо демпфирование для рассеивания энергии и сдерживания вибрации. Объекты с большим демпфированием быстрее расходуют энергию под действием внешних сил. Опорно-двигательный аппарат человеческой руки может гибко регулировать демпфирование для безопасного и стабильного выполнения различных задач. Для сбора таких параметров, как контактная сила и скорость, была создана динамическая платформа сбора данных, позволяющая фиксировать движение руки. Основными компонентами системы являются подсистема захвата движения и подсистема измерения контактной силы. Датчик силы ATI omega160 6D используется для сбора данных о силе контакта между рукой человека и деталями сборки, а данные о конечной скорости движения руки человека получаются с помощью системы захвата движения Stereolabs ZED mini.
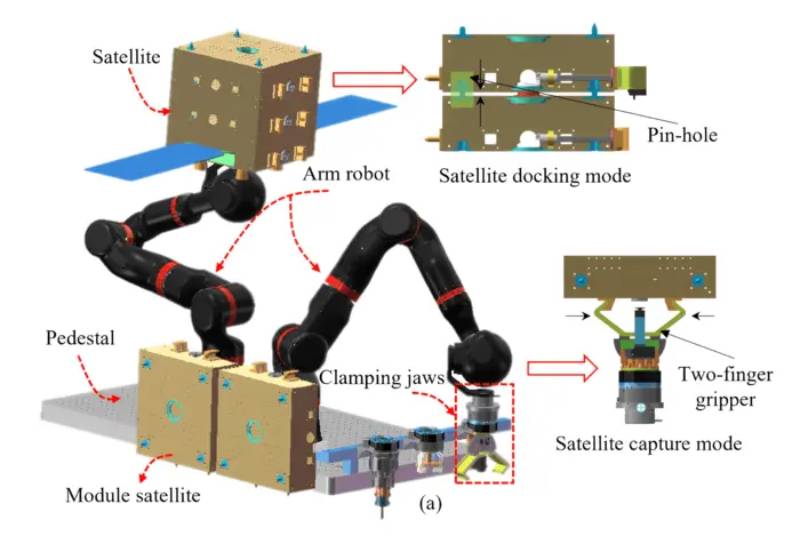
Для того чтобы робот мог лучше выполнить задачу сборки, исследователи обобщили динамические характеристики человека, проанализировав данные о движении человеческой руки в процессе сборки, и применили эту возможность к роботам. Кроме того, поскольку задачи сборки спутников разнообразны, а схемы контактов сложны, исследовательская группа проанализировала различные сценарии в процессе сборки спутников и вывела три схемы контактов для сборки спутников.
В рамках своего эксперимента команда провела проверку моделирования сборки космических спутников с помощью наземной экспериментальной платформы. Роботизированная платформа позволяет измерять силы и крутящие моменты на конце роботизированной руки в направлениях X, Y и Z. Они применили человекоподобный регулятор переменного параметра адмиттанса для эксперимента по сборке спутника-робота и успешно проверили эффективность человекоподобного регулятора переменного параметра адмиттанса. Человекоподобные стратегии управления могут повысить адаптивность, точность и управляемость роботов, выполняющих задачи сборки и обслуживания космических аппаратов. Однако необходимы дальнейшие исследования, чтобы роботы могли выполнять гибкие задачи сборки, сравнимые с реальными человеческими. Необходимы также долговечные и надежные роботы, способные выдерживать жесткие условия космического пространства. Прогресс в области стратегий управления гуманоидами может иметь важное значение для будущего исследования и освоения космоса, повышая эффективность, безопасность и надежность миссий, — заключает Чжихун Цзян, профессор Пекинского технологического университета. 28.10.2023 |
Хайтек
 | |
| Applied Physics Express: Изобретен компактный лазер для дезинфекции | |
Первый в мире компактный синий полупровод... | |
 | |
| Ученые ЮУрГУ создают ковалентные каркасы — новый материал для оптики | |
Новые вещества под названием ковалентные ... | |
 | |
| Нагреватель будущего: как разработка студента МФТИ изменит наноэлектронику | |
Студент магистратуры Московского физико-технич... | |
 | |
| Выяснилось, что композиты с древесиной лучше выдерживают высокие температуры | |
Ученые из Российского экономического унив... | |
 | |
| Излучение 5G меняет ткани мозга крыс, но решать, плохо это или хорошо, пока рано | |
Ученые ТГУ провели эксперимент и про... | |
 | |
| Робот с винтовым двигателем сможет добывать полезные ископаемые на Луне | |
Экспериментальный робот показал, что може... | |
 | |
| Ученые создали элементы системы управления синхротронным пучком для СКИФа | |
Сотрудники университета и ученые из ... | |
 | |
| PNAS: Создан реактор для безопасной добычи лития из соляных растворов | |
Новое устройство, которое позволяет добывать л... | |
 | |
| Nature: Ученые исследуют строение ядер химических элементов с помощью лазеров | |
Группа ученых из разных стран попыталась ... | |
 | |
| Nature Nanotechnology: Новый материал охлаждает на 72% лучше любых термопаст | |
В местах, где хранятся и обрабатываю... | |
 | |
| NatComm: Учёные приблизились к созданию биополимеров, реагирующих на воду | |
Новый подход для понимания и предска... | |
 | |
| В Челябинске разрабатывают инновационное оборудование для вибрационных испытаний | |
Специалисты ЮУрГУ совместно с Уральским и... | |
 | |
| В ТПУ создали многоразовые накопители водорода из отечественного сырья | |
Более дешевые металлогидридные накопители водо... | |
 | |
| Новый подход к производству цифрового света решает проблемы 3D-печати | |
Новый метод производства цифрового света для&n... | |
 | |
| AEM: Гибридный полупроводник позволит лучше понять спинтронику | |
Электроны вращаются без электрического за... | |
 | |
| Томские ученые представили цифровое решение для оптимизации НПЗ | |
Новый программный комплекс представили ученые ... | |
 | |
| МАИ: Дроны-дефектоскописты уступают человеку в точности, зато берут скоростью | |
Методику создания синтетических данных для&nbs... | |
 | |
| Численное моделирование повысит эффективность 3D-печати из стали 316LSi | |
Морская нержавейка, или сталь 316LSi, шир... | |
 | |
| Создан особо пластичный алюминиевый сплав для высокотехнологичных отраслей | |
Новый сплав на основе алюминия создали ис... | |
 | |
| В НГУ разработали первые фильтры для технологии связи 6G | |
Уникальные фильтры для импульсной терагер... | |
 | |
| Nat. Nanotechnol: Разработан самоочищающийся электрод для синтеза пероксидов | |
Пероксиды металлов — MO₂, M=Ca, Sr,... | |
 | |
| В СПбГУ создали новые биоактивные молекулы с помощью золотого катализатора | |
Метод соединения двух простых веществ с п... | |
 | |
| AFM: Разработан материал для поглощения электромагнитных волн широкого спектра | |
Ультратонкий пленочный композитный материал, с... | |
 | |
| PRL: Доказана возможность открытия новых сверхтяжелых элементов | |
Уран — самый тяжелый из извест... | |
 | |
| NE: Новый жидкостный акустический датчик распознаёт голоса в шумной обстановке | |
Инженеры разработали множество сложных датчико... | |
 | |
| Science: Новый метод спектроскопии раскрывает квантовые секреты воды | |
Вода — это жизнь. Но водо... | |
 | |
| В ИРНИТУ создали первую партию инклинометров и объединили их в умную сеть | |
Сотрудники Центра маркшейдерских и геодез... | |
 | |
| Ученые УУНиТ создали первый отечественный станок для сухого электрополирования | |
Ученые Уфимского университета науки и тех... | |
 | |
| Ученые КФУ выяснили, как дефекты в полупроводниках влияют на свет | |
Физическая модель, которая описывает взаимодей... | |
 | |
| Новый метод синтеза лекарств открыли российские химики | |
Новый метод синтеза производных пирролизидина ... | |