 |
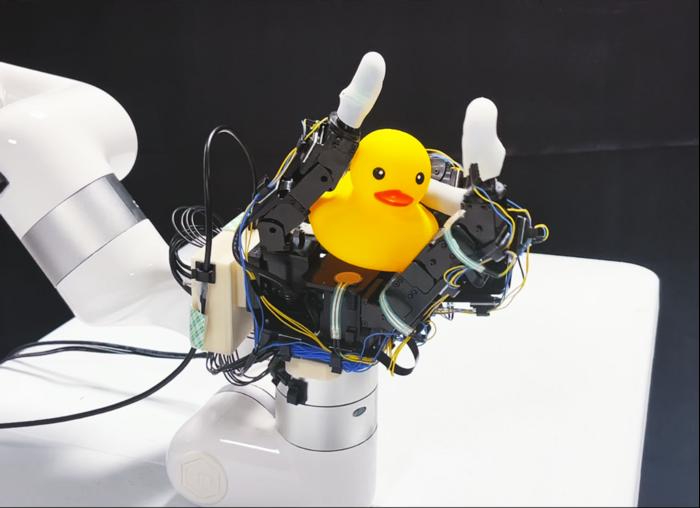
Вдохновившись тем, как легко человек управляется с предметами, не видя их, группа инженеров из Калифорнийского университета в Сан-Диего разработала новый подход, позволяющий роботизированной руке вращать предметы исключительно с помощью осязания, не полагаясь на зрение. Используя эту методику, исследователи создали роботизированную руку, которая может плавно вращать самые разные предметы — небольшие игрушки, консервные банки и даже фрукты и овощи, не сминая и не раздавливая их. Для выполнения этих задач роботизированная рука использует только информацию, основанную на осязании. Эта работа может помочь в разработке роботов, способных манипулировать предметами в темноте. Команда представила свою работу на конференции 2023 Robotics: Science and Systems Conference. Для создания системы исследователи прикрепили 16 сенсорных датчиков к ладони и пальцам четырехпалой роботизированной руки. Каждый датчик стоит около 12 долл. и выполняет простую функцию: определяет, прикасается к нему объект или нет. Уникальность этого подхода заключается в том, что он опирается на множество недорогих сенсорных датчиков с низким разрешением, которые используют простые двоичные сигналы — касание или отсутствие касания — для выполнения роботизированного вращения руки. Эти датчики расположены на большой площади роботизированной руки. В отличие от ряда других подходов, использующих несколько дорогостоящих сенсорных датчиков высокого разрешения, закрепленных на небольшом участке роботизированной руки, в основном на кончиках пальцев. По словам Сяолуна Ванга, профессора электротехники и вычислительной техники Калифорнийского университета в Сан-Диего, возглавлявшего данное исследование, с этими подходами связано несколько проблем.
И, наконец, многие из этих подходов по-прежнему опираются на зрение.
Исследователи также отмечают, что большой охват бинарных сенсорных датчиков дает роботизированной руке достаточно информации о трехмерной структуре и ориентации объекта, чтобы успешно вращать его без помощи зрения. Сначала они обучили свою систему, выполнив симуляцию вращения виртуальной роботизированной рукой различных объектов, включая объекты неправильной формы. Система оценивает, какие датчики на руке касаются объекта в каждый момент времени во время вращения. Кроме того, она оценивает текущее положение суставов руки, а также их предыдущие действия. Используя эту информацию, система указывает роботизированной руке, какой сустав куда следует направить в следующий момент времени. Затем исследователи протестировали свою систему на реальной роботизированной руке с объектами, с которыми система еще не сталкивалась. Роботизированная рука смогла вращать различные объекты без остановки или потери фиксации. Среди объектов были помидор, перец, банка арахисового масла и игрушечная резиновая уточка, которая оказалась наиболее сложным объектом из-за своей формы. Объекты более сложной формы вращались дольше. Роботизированная рука также могла вращать объекты вокруг разных осей. В настоящее время Ванг и его команда работают над тем, чтобы распространить свой подход на более сложные задачи манипулирования. В настоящее время они разрабатывают методы, которые позволят роботизированным рукам, например, ловить, бросать и жонглировать.
25.07.2023 |
Хайтек
 | |
| Scientific Reports: Создан ультразвуковой настраиваемый ЖК-рассеиватель света | |
Свет необходим для жизни. С момента ... | |
 | |
| APL Materials: Открыт метод лазерной печати для создания запоминающих устройств | |
Цифровые технологии не заменяют печатные.... | |
 | |
| Ученые МИСИС выяснили, как сделать суперконденсаторы ещё круче | |
Исследователи из университета МИСИС усове... | |
 | |
| Учёные МИСИС и ИФХЭ РАН разработали быстрый и дешёвый метод получения вольфрама | |
Учёные из Университета МИСИС и Инсти... | |
 | |
| IEEE Access: Актуатор в реабилитационных перчатках восстановит движение пальцев | |
Мягкие реабилитационные перчатки помогают паци... | |
 | |
| Science Advances: Ученые научились предсказывать водородное охрупчивание | |
При выборе материала для инфраструктурных... | |
 | |
| Учёные одновременно картировали температуру и поток в конвективных микропотоках | |
Исследователи из Токийского столичного ун... | |
 | |
| В ПИШ КАИ создали «мост» к цифровому двойнику композитных преформ | |
Образовательное пространство Технологическое м... | |
 | |
| PRC: Ядерная структура титана-48 меняется при наблюдении с разного расстояния | |
Физики из Osaka Metropolitan University в... | |
 | |
| Nature Physics: Новый коллайдер стал ближе с технологией маршалинга мюонов | |
Эксперименты показали, что мюоны можно ис... | |
 | |
| Опровергнута гипотеза о причине изменения формы сплавов при намагничивании | |
Учёные из Объединённого института ядерных... | |
 | |
| Ученые совершили рывок в локализации электролиза воды с анионообменной мембраной | |
Исследовательская группа под руководством... | |
 | |
| Исследование кристаллографов СПбГУ приведет к созданию более прочной керамики | |
Исследователи из Санкт-Петербургского уни... | |
 | |
| Квантовая томография выходит на новый уровень благодаря российским физикам | |
Учёные из Университета МИСИС и Росси... | |
 | |
| Ученые повысили рабочие характеристики изделий из никелевых суперсплавов | |
В МИСИС представили улучшенную технологию защи... | |
 | |
| Physical Review Letters: Ученые описали альтернативный магнетизм | |
Магнитные материалы традиционно классифицируют... | |
 | |
| Light Sci Appl: Фотонный фонарь, напечатанный в 3D, открывает новые возможности | |
Оптические волны, распространяющиеся по в... | |
 | |
| Nature Materials: Ученые разработали рентген, позволяющий заглянуть в кристалл | |
Группа исследователей из Нью-Йоркского ун... | |
 | |
| Nature: Международная группа ученых решает сложную физическую задачу | |
Сильно взаимодействующие системы играют важную... | |
 | |
| Неоднородная мягкость тел позволяет создавать более мягкие аморфные материалы | |
Ученые из Токийского столичного университ... | |
 | |
| Созданы чернила для 3D-печати гибких устройств без механических соединений | |
Для инженеров, работающих над мягкой робо... | |
 | |
| Инструмент прогнозирования ускорит исследования в области сверхпроводников | |
Функциональность многих современных передовых ... | |
 | |
| В MIT разрабатывают бытовых роботов, наделенных здравым смыслом | |
С помощью большой языковой модели инженеры Мас... | |
 | |
| В двумерных сверхпроводниках открыта незаметная квантовая критическая точка | |
Слабые флуктуации в сверхпроводимости, яв... | |
 | |
| Роняйте на здоровье. Разработан материал для электроники с адаптивной прочностью | |
Неприятности случаются каждый день, и есл... | |
 | |
| 2-фотонная фотоэмиссионная спектроскопия помогла понять поведение электронов | |
Органическая электроника — область,... | |
 | |
| Печатный полимер позволяет изучить хиральность и спины при комнатной температуре | |
Печатаемый органический полимер, который при&n... | |
 | |
| Nature Communications: Открыто революционное явление в жидких кристаллах | |
Исследовательская группа, работающая в UN... | |
 | |
| PRL: Ученые продвинулись в управляемом ускорении электронов в микромасштабе | |
Исследователи из Стэнфорда приблизились к... | |
 | |
| Physical Review Applied: Ниобий воскресили для квантовых технологий | |
Когда речь заходит о сверхпроводящих куби... | |